使用 JAKA Dashboard 模板
使用 JAKA Dashboard 模板
该页面包含了 JAKA Dashboard 模板预览的详细使用指南。
为了方便使用,我们在 JAKA Node-RED 的例子库中预置了一些和机器人操作相关的模版。用户可以直接使用这些模版搭建页面,或者根据自己的需要改造模版。 这些模版将 Dashboard 中的组件(输入框、按钮、菜单等)和 JAKA 自定义服务(获取机器人信息、设置机器人信息等)组合,实现了各种功能。
导入模板
用户可在 Node-RED 中找到所有预置的模版,导入后部署即可直接使用。也可以导入不同模版中所需的组件进行组合后部署、使用。
基本概念
布局
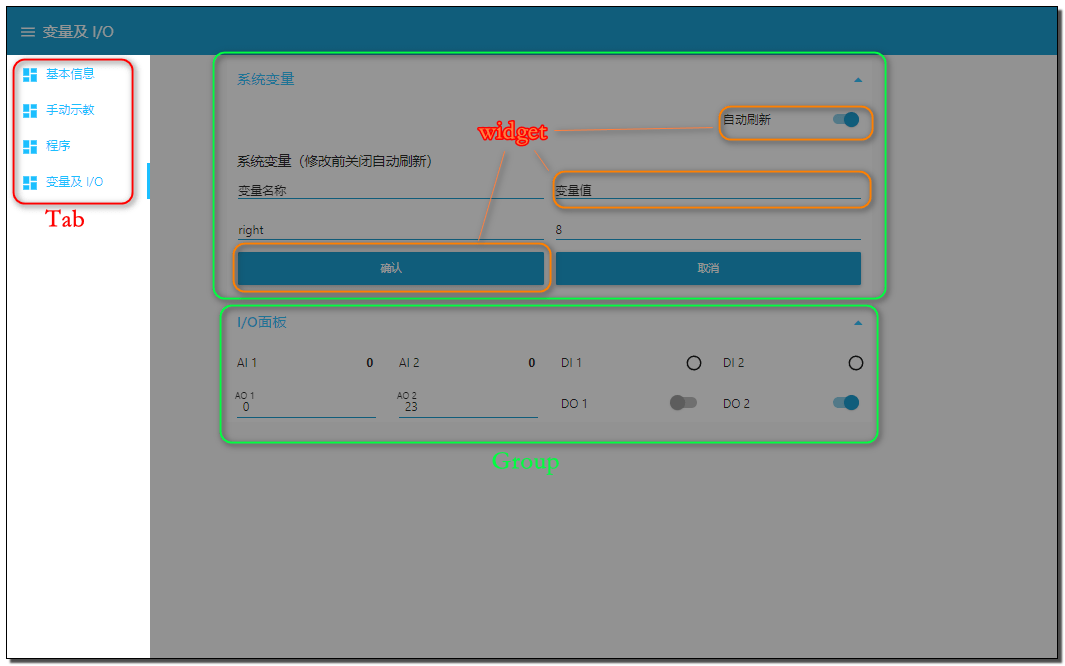
Dashboard 页面布局应视为一个网格。
每个Tab (标签页)可以理解为一个页面,一个 Tab 中可以包含多个 Group ,一个 Group 中可以包含多个 widget 。 在编辑组件时,可以为组件指定 Group 。编辑 Group 时可以指定 Tab 。
每个 group (组)都有宽度--默认为 6 个 "单位"(默认情况下,一个单位宽 48px,间距 6px)。
group(组)中的每个 widget (组件)也有宽度--默认为 "自动",这意味着它将填充所在组的宽度,但你也可以将其设置为固定的单位数。
Dashboard 的布局算法总是尽量将项目置于其容器的左上角,这既适用于组在页面上的位置,也适用于部件在组中的位置。
模板导入后,其中的组件件位置可能会错乱,可以通过在 layout 设置中恢复布局,或者调整为想要的任意布局。
模板总览
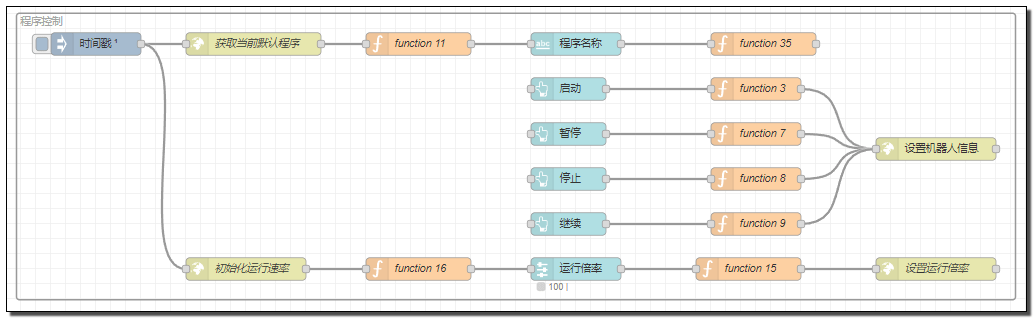
程序控制
程序控制模板主要的功能是启动、暂停、继续、停止程序
该模板中包含了输入框、按钮、滑动条的使用。
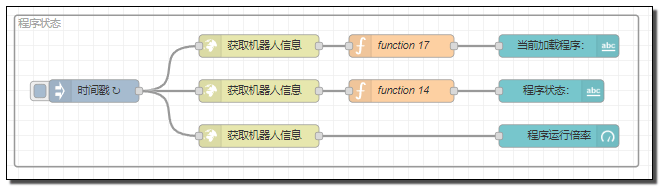
程序状态
实时查看当前加载程序及其运行速率、运行状态。
该模板中包含了仪表组件的使用。
电源控制
控制机器人电源和使能状态
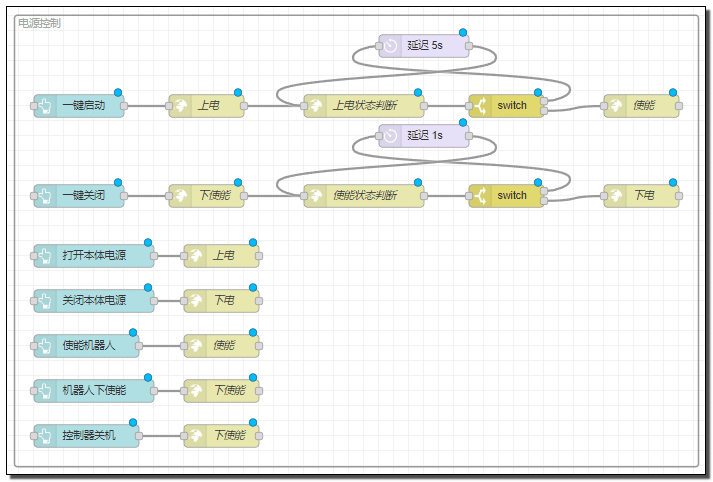
一键启动功能会先上电机器人,在上电之后自动循环检测上电状态,检测到上电成功后继续自动上使能。循环检测的时间可以在延时节点中自行调整。
机器人状态
对机器人各类状态进行监控
该模板包含了一个能捕获机器人错误码和状态码的组件,以及一个曲线图表(用于实时显示控制器温度、机器人速度等)的组件。
说明
使用虚拟机录制演示视频,因此控制器温度和功率没有数据。
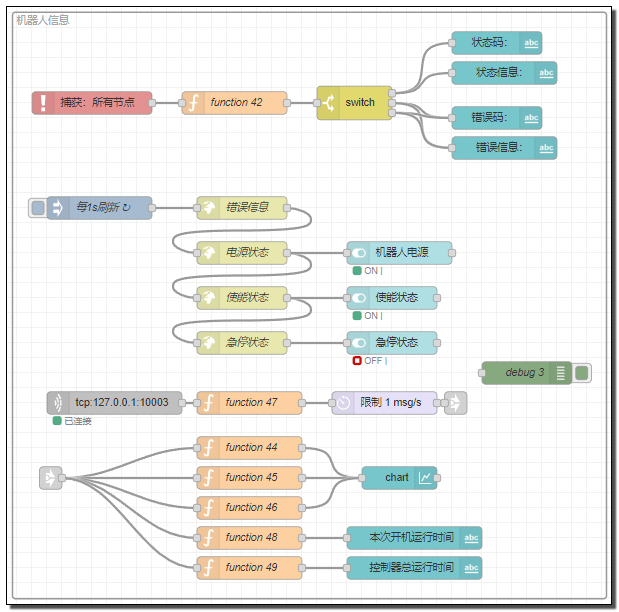
错误和状态信息捕获
为了能够准确和全面的捕获信息,建议使用“获取机器人信息”节点定时刷新错误信息的同时,使用 Node-Red 中的 catch 节点对所有节点的报错进行捕获,之后通过 switch 节点进行过滤和分流。
由“获取机器人信息”“设置机器人信息”和“机器人运动控制”节点报出的信息或错误都含有 topic,共三类:
- jaka_info:信息
- jaka_warning:警告
- jaka_error:错误
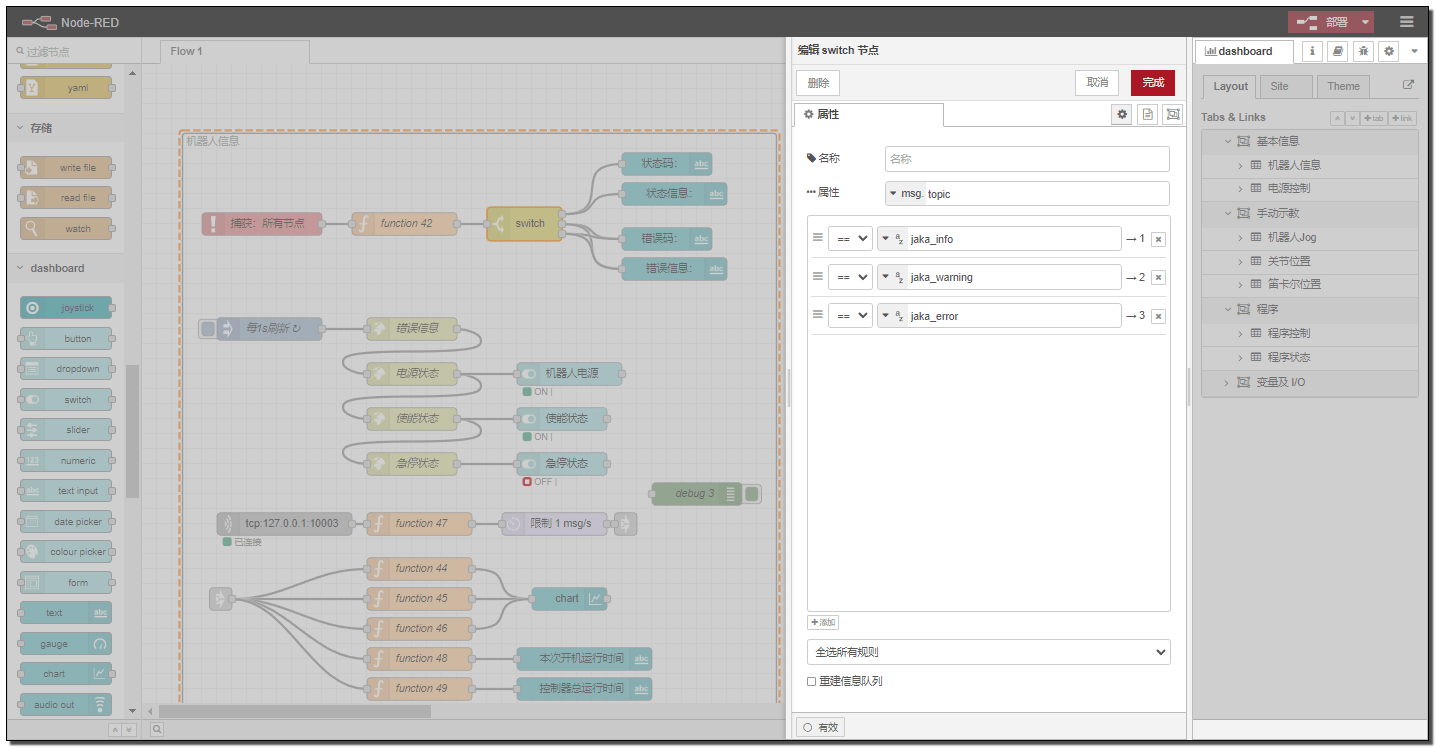
状态图标
使用 Dashboard 的 switch 组件,选择自定义图标即可使用不同的图标来显示不同的状态。
图表信息
图表信息来源为控制器的 10003 端口,使用 tcp in 节点进行监听。为了避免高频的更新导致页面崩溃,使用 delay 节点对消息限流。 然后使用 link out 节点监听到的内容发出,之后可以在任意地方都可以使用 link in 节点接收 10003 端口发送的内容。
10003 端口每 80ms 推送一次带有时间戳的数据,非常适合获取高频刷新和对时间敏感数据,例如实时的位置信息、功率、扭矩等。
机器人JOG
通过摇杆控制机器人移动
该模板中包含了摇杆组件和下拉菜单组件。
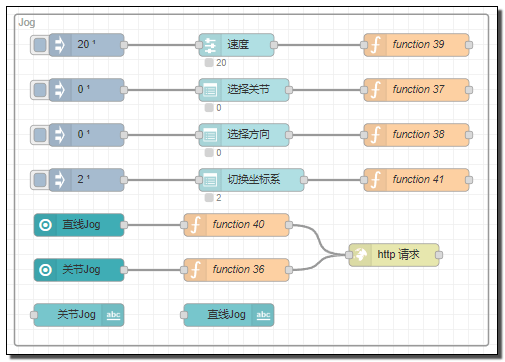
该模板支持直线 Jog 和关节 Jog,每次只能 Jog 一个方向或关节。直线 Jog 时可以切换世界坐标系或工具坐标系。
位置信息
实时获取位置信息
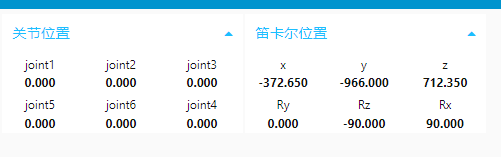
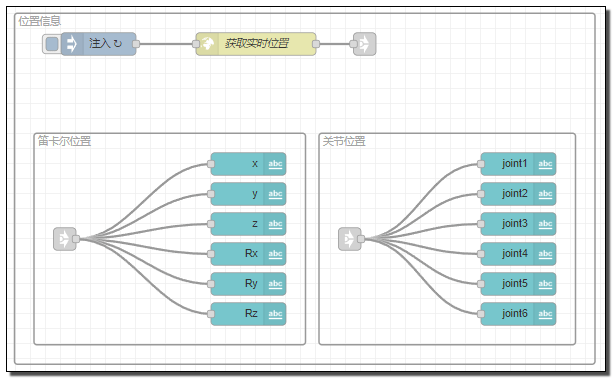
该模板中使用 JAKA 自定义服务 获取机器人信息 节点来获取位置信息,由于使用 http 请求,因此不能严格的保证数据的时间间隔。 如需高频地获取点位,或对点位有严格时间要求时,可以使用 10003 端口返回的数据替代。
系统变量
监控和设置系统变量的值,监控的数据只有在程序运行时才准确。
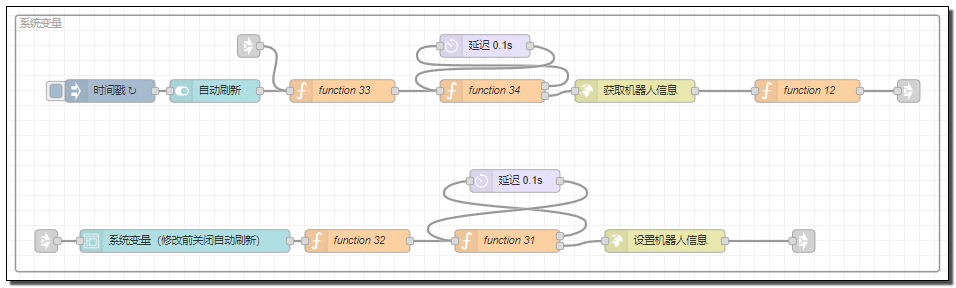
该模板默认可以监控和设置两个变量,如果需要添加更多变量,可以修改系统变量表单。
注意
新增的变量名称必须以 varName varValue 开头,后加一个数字,顺序递增。
I/O 面板
监控和设置I/O的值。
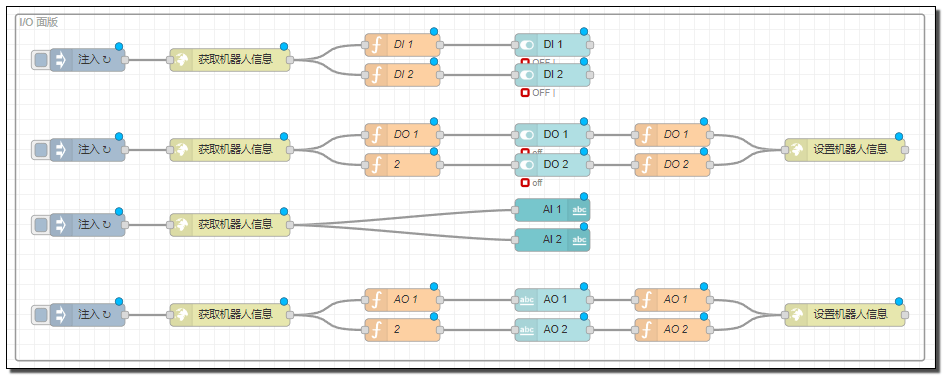
增加 IO 数量
下面以增加一个 DI 为例演示如何添加更多 IO。
切换 IO 来源
下面以 DI 为例,将 DI 的来源由 Modbus slave 切换为 控制柜。