大寰夹爪插件
大寰夹爪插件
该AddOn适用于大寰夹爪PGE系列。包括夹爪指令块、夹爪控制页面。
插件信息
- 名称:dh_custom_cmd
- 版本:v2.3
安装指南
系统要求:
控制器:v1.7.1.19 及以上
App:v1.7.1.16 及以上
JAKA-AddOn-Kit:v1.3及以上安装插件
打开App-设置-系统设置-附加程序,点击右上角的“+”按钮,安装该插件。

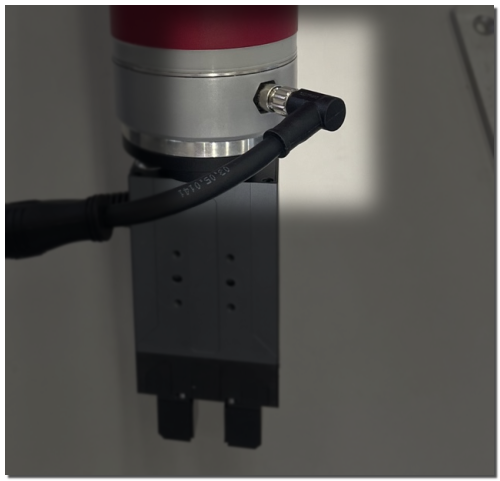
安装夹爪
方法一:通过控制柜RS485通道连接。
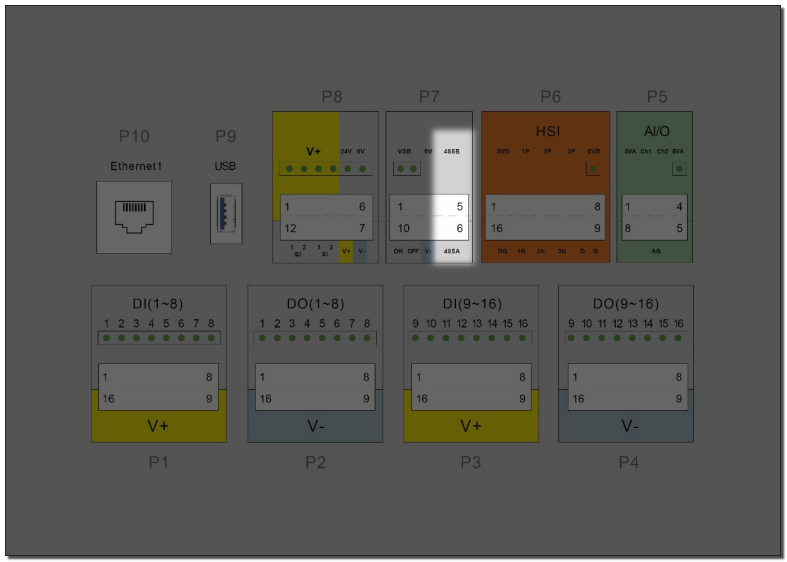
方法二:通过大寰提供的转接线(与JAKA末端TIO适配型号)将夹爪连接到机器人TIO接口。
配置指南
配置插件
运行插件,点击插件操作选项栏中的“齿轮”按钮,进入配置页面。
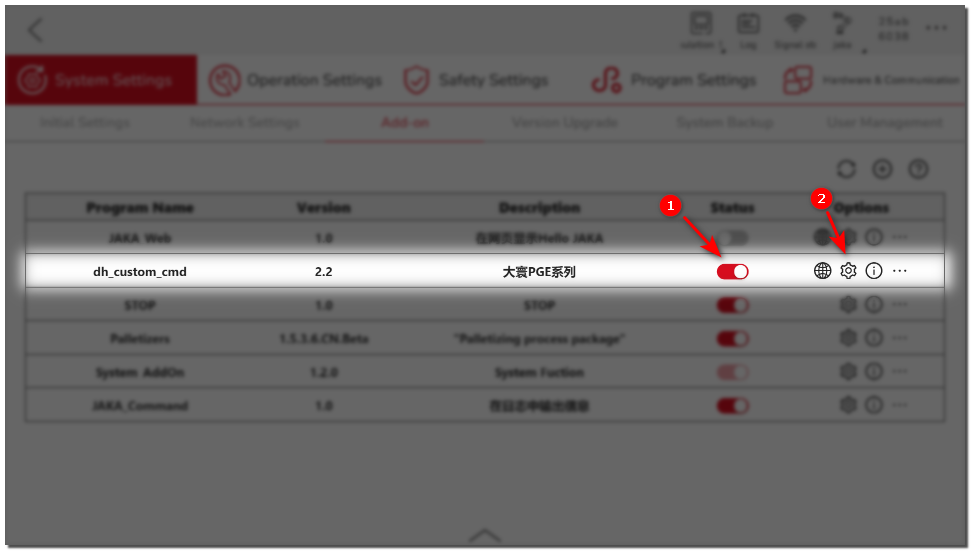
Socket port: 夹爪自定义指令使用了socket通讯,会占用一个socket端口,如有冲突可以修改使用的端口号。
Modbus type: 夹爪连接方式选择,若通过末端TIO连接请选择TIO,若通过控制柜RS485连接请选择Cabinet。
配置通讯
支持两种连接方式:末端TIO-RS485 或者 控制柜RS485。
TIO连接时需要如下配置:
步骤一:配置模拟输入通道,复用为RS485通道2。
步骤二:配置Modbus参数。 步骤三:添加信号量status_init,status_run,speed,force,position。
步骤三:添加信号量status_init,status_run,speed,force,position。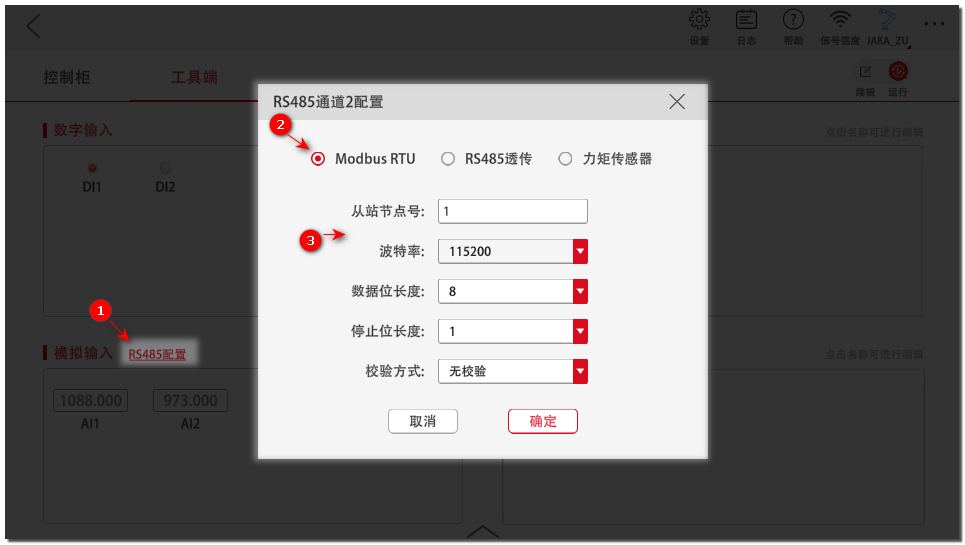

通过控制柜RS485连接进行如下配置:
步骤一:将 AddOn 配置中的 Modbus type 切换至 cab 。
步骤二:要保证夹爪关闭 IO 模式。
步骤三:要保证夹爪的从站id为1,波特率115200,数据位长度8,停止位长度1,无校验。然后直接使用即可,无需对控制器进行其他配置。
使用说明
指令块
在App编程页面-扩展中找到夹爪指令块。
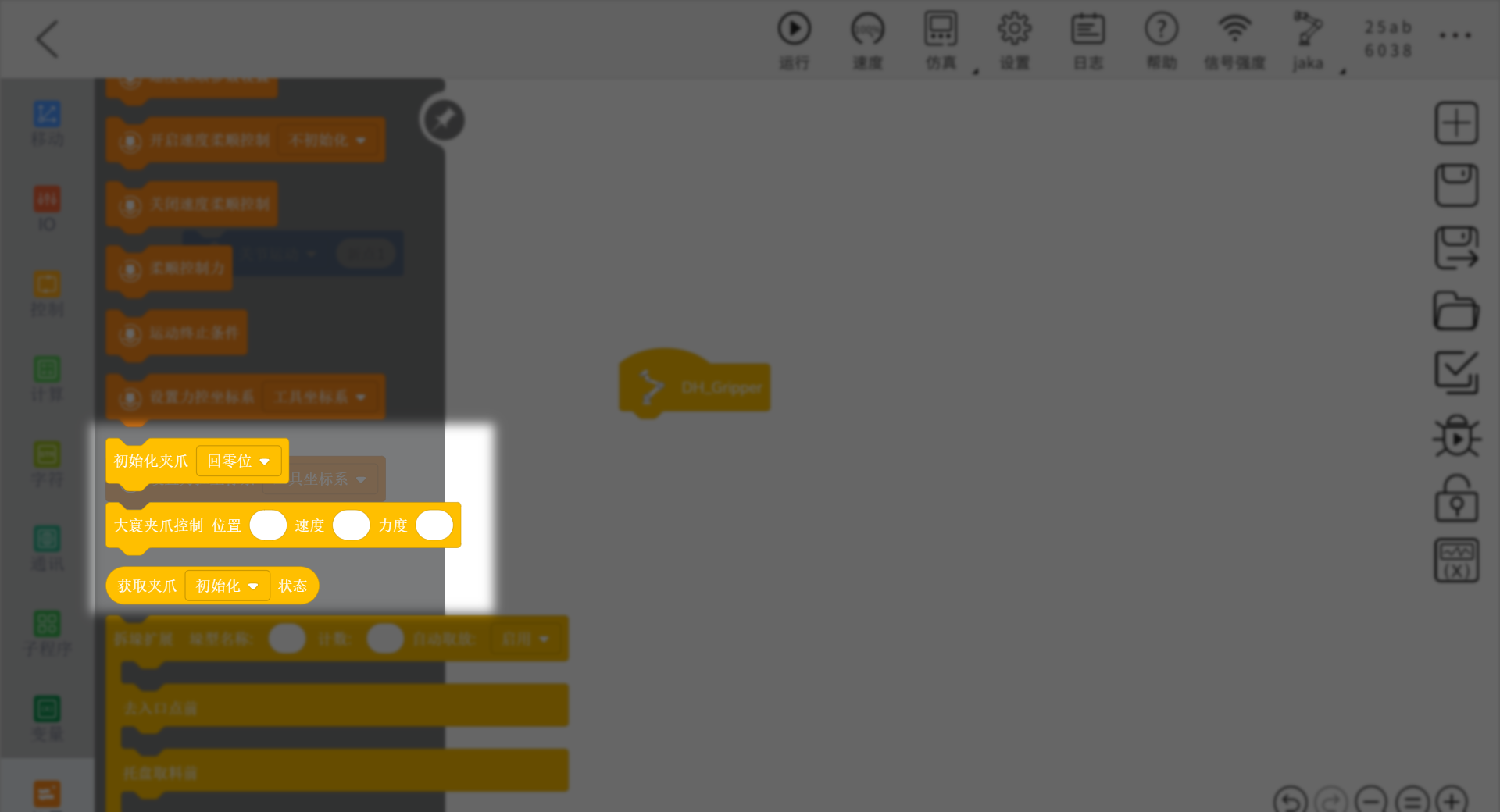
类型一
初始化夹爪:可以选择两种初始化方式,可参考大寰夹爪使用手册。
类型二
控制夹爪:支速度(1-100)、力度(20-100)、位置控制(0-100)。单位均为百分比,若设置的值超出最大/小值,则默认使用最大/小值。
类型三
获取夹爪状态:初始化状态(0,1,2)、加持状态(0,1,2)、位置。返回值为字符串。
控制页面 在附加程序页面,AddOn的操作选项一列中找到"地球"按钮,点击打开控制页。

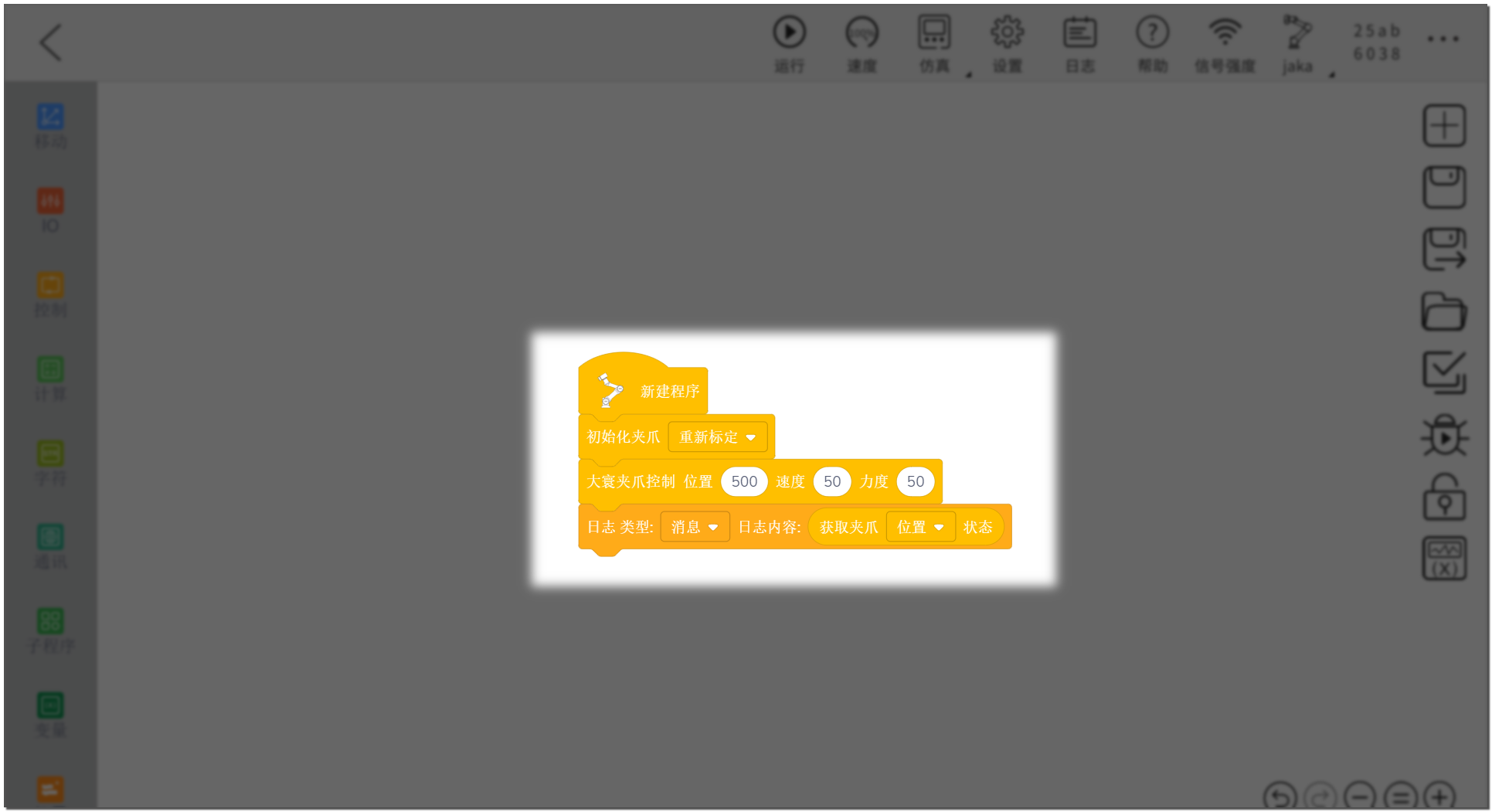
- 使用示例
故障排除
- 常见问题 暂无
更新和升级
版本历史
v2.2.0
- 基于AddOn3.0开发,支持控制柜RS485和TIO。
- 基于PGE系列通讯手册开发。
- 控制页面控制支持。
支持和联系方式
插件获取方式
- 联系JAKA销售或技术人员获取。
- 通过GitHub自行下载打包,点击跳转。