DH Gripper AddOn
DH Gripper AddOn
This AddOn is suitable for DH Gripper PGE series, including gripper command blocks and gripper control page.
AddOn Information
- Name: dh_custom_cmd
- Version: v2.3
Installation Guide
System Requirements:
Controller: v1.7.1.19 and above
App: v1.7.1.16 and above
JAKA-AddOn-Kit: v1.3 and aboveInstall the AddOn
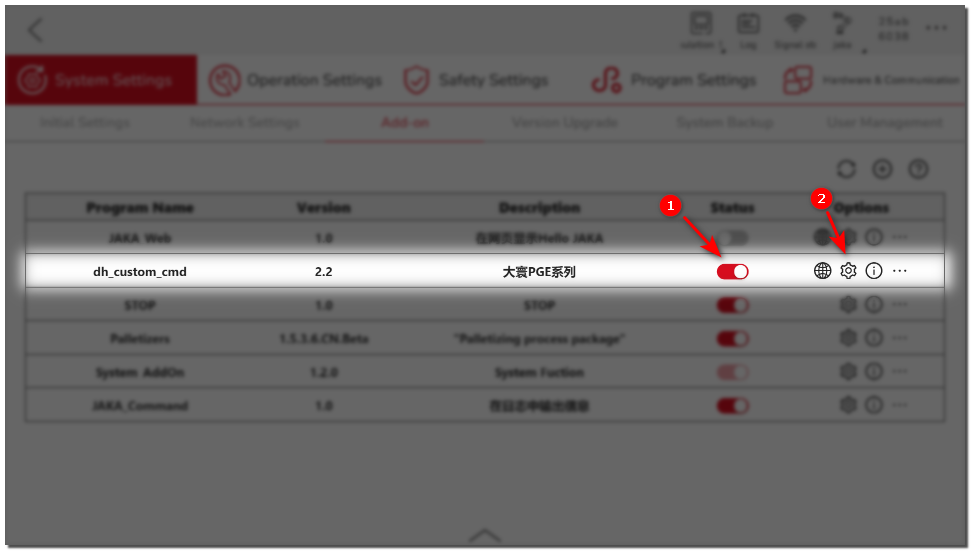
Open the App-Settings-System Settings-Add-on, click the "+" button in the upper right corner, and install the AddOn.

Connect the Gripper
Method one: Connect through the control cabinet's RS485 channel.
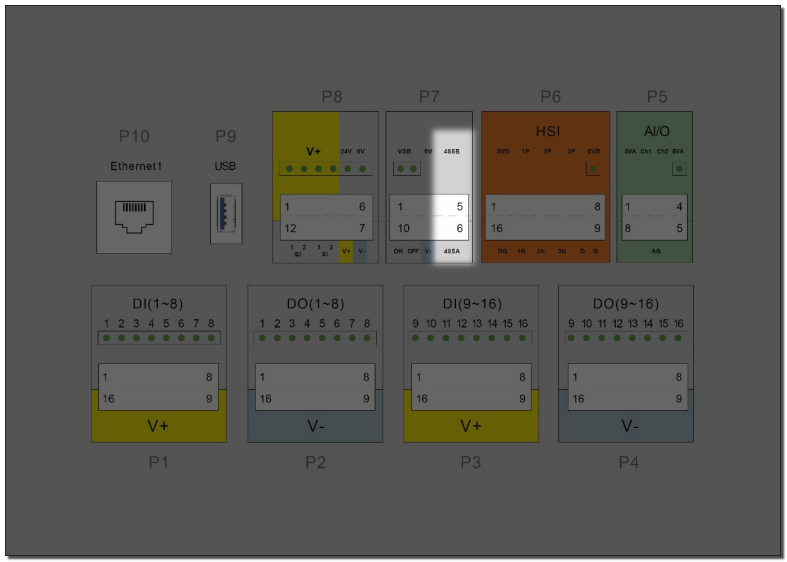
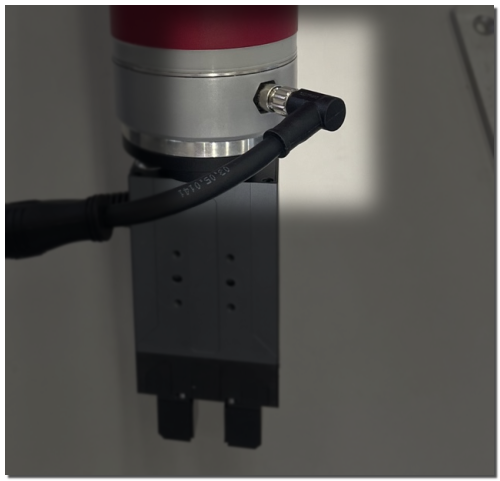
Method two: Connect the gripper to the robot's TIO interface by using the JAKA dedicated TIO connection cable provided by DH.
Configuration Guide
Configure the AddOn
Run the AddOn, click the "gear" button in the operation options bar to enter the configuration page.
Socket port: The gripper custom command uses socket communication and will occupy a socket port. If there is a contradiction, the port number can be modified.
Modbus type: Gripper connection method selection. Choose TIO if connected through the end TIO, and choose Cabinet if connected through the control cabinet RS485.
Configure the Communication
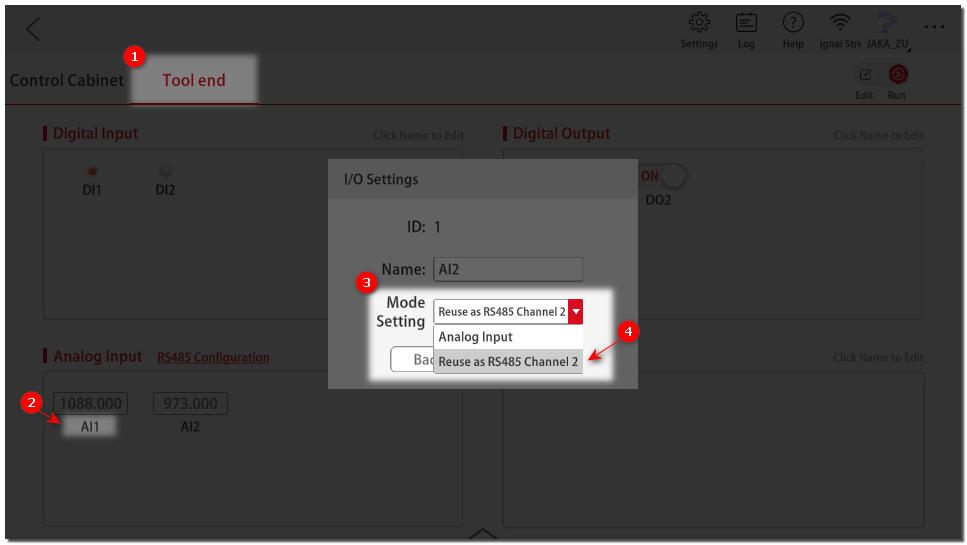
When configure the TIO, you should:
Step 1: Configure the analog input channel, reuse it as RS482 channel 2.
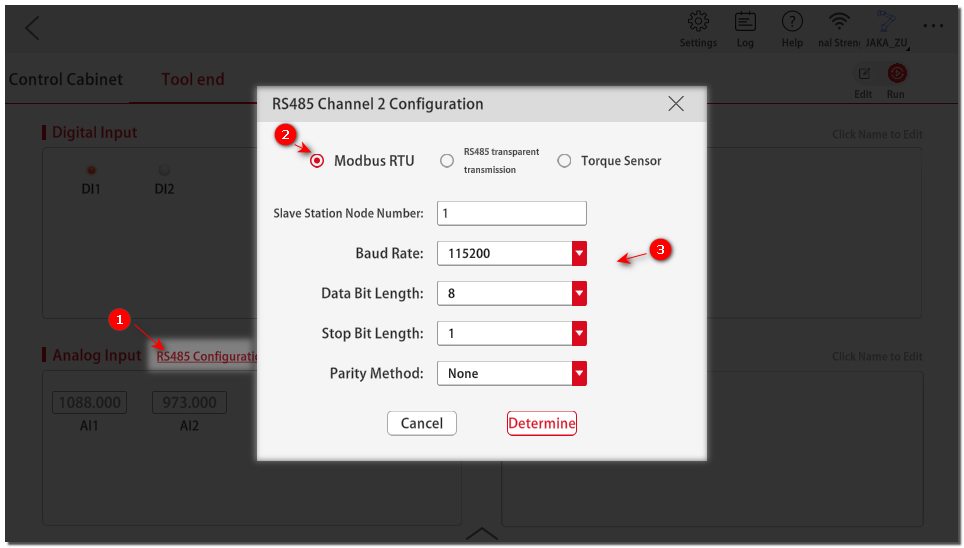
Step 2: Configure Modbus parameter.
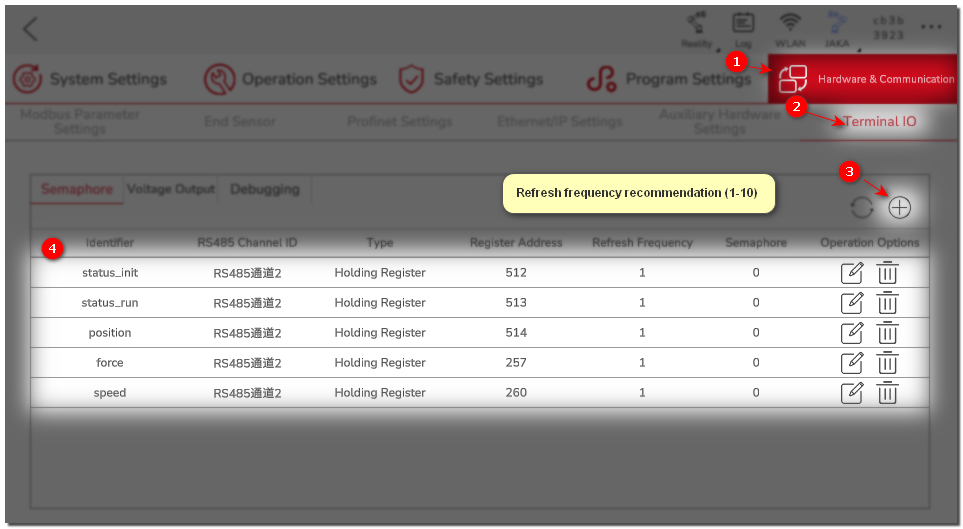
Step 3: Add signals: status_init, status_run, speed, force, position.
When connecting through the control cabinet RS485, you should:
Step 1: Switch the Modbus type in the AddOn configuration to cab.
Step 2: Make sure the gripper is off IO mode.
Step 3: Ensure that the gripper's slave ID is 1, baud rate is 115200, data bit length is 8, stop bit length is 1, and no parity.Then you can use it directly without any other configuration of the controller.
Instructions
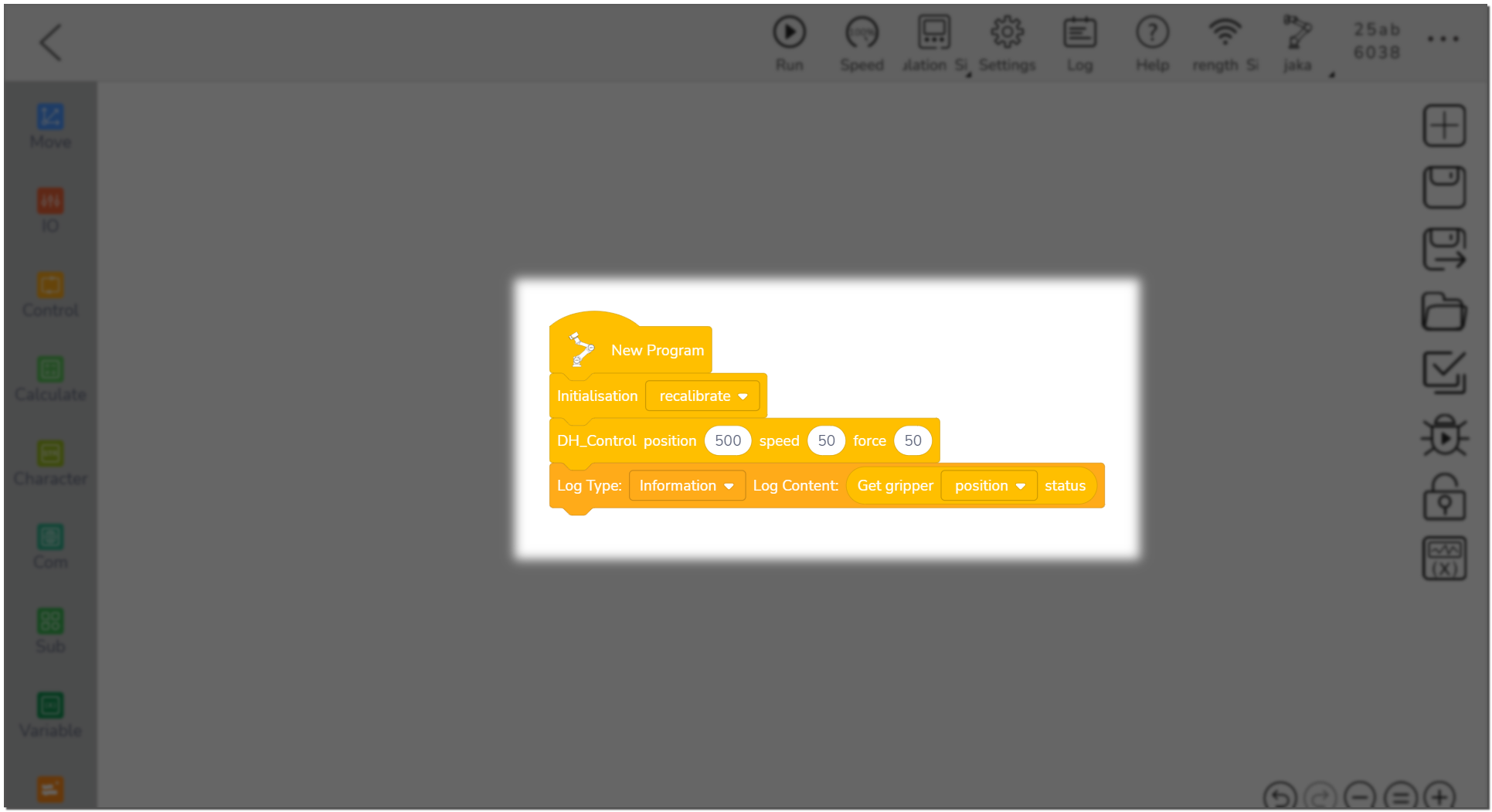
Command Blocks In the App's programming page-Extensions, find the gripper command blocks, which have three types.

Type One
Initialize Gripper: Two initialization methods are available, refer to the DH Gripper user manual for details.
Type Two
Control Gripper: Support speed (1-100), force (20-100), position control (0-100). All units are in percentage, if the set value has exceeded the upper/lower limits, it will be considered as using the upper/lower limits.
Type Three
Get Gripper Status: Initialization status (0,1,2), holding status (0,1,2), position. Return value is in string format.
Control Page In the Add-on page, find the "Earth" button in the operation options column, click to open the control page.

- Example
Troubleshooting
- Common Issues None at the moment
Updates and Upgrades
Version History
v2.2.0
- Developed based on AddOn3.0, supports control cabinet RS485 and TIO.
- Developed based on PGE series communication manual.
- Control page support.
Support and Contact Information
- Learn more about AddOn information
- Learn the development tutorial for this AddOn.
How to Get AddOn Packages
- Contact JAKA sales or technical personnel to obtain.
- Download it through GitHub, click here to jump.